随着科技的发展,机器人产业增长的非常迅速,大量的机床厂商、伺服产商等有条件的企业都将目光转向机器人市场,就目前而言,机器人通常会使用伺服电机,伺服电机是机器人制造中一个重要的部件,它影响着机器人是否能够正常使用。
伺服电机的控制原理是依靠脉冲来定位的,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,因此伺服电机对工业机器人的精准度有很重要的影响。

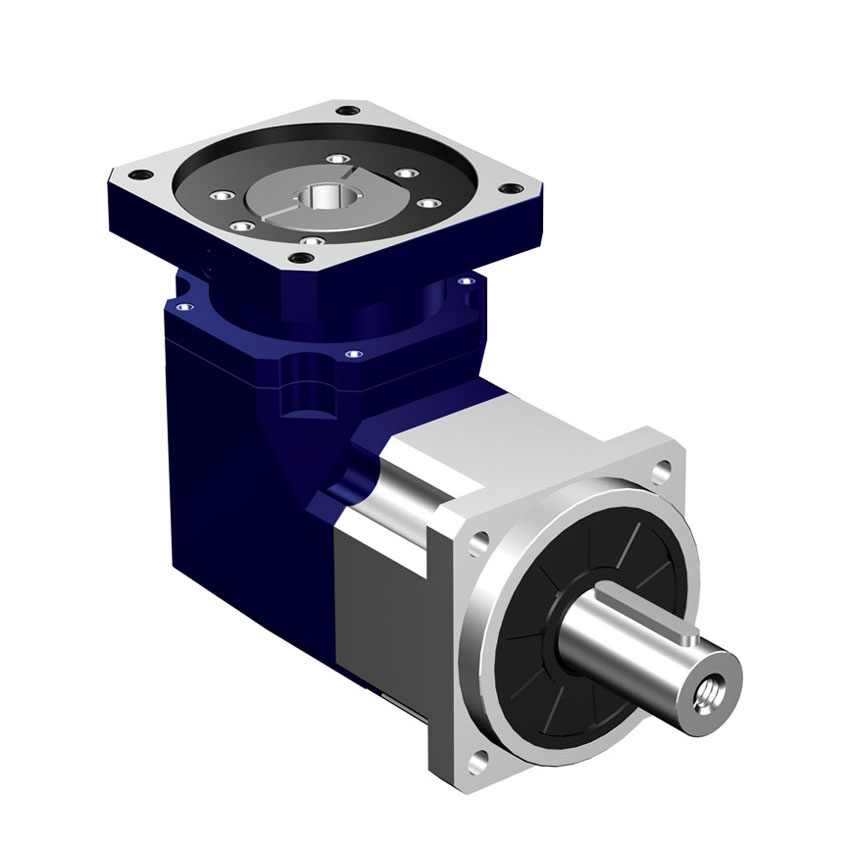
目前,由于高启动转矩、大转矩、低惯量的交、直流伺服电机在工业机器人中得到广泛的应用。其他电机,如交流伺服电机、步进电机根据不同的应用需求也会应用到工业机器人中。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电机,尤其是要求快速响应时,伺服电机必须具有较高的可靠性,并且有较大的短时过载能力。具体使用要求:
伺服电机在工业机器人中的巧妙应用快速性
启动转矩惯量比大
控制特性的连续性和直线性,随着控制信号的变化,电机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。
调速范围宽
体积小、质量小、轴向尺寸短
能经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能够在短时间内承受过载。


 联系人:程先生
联系人:程先生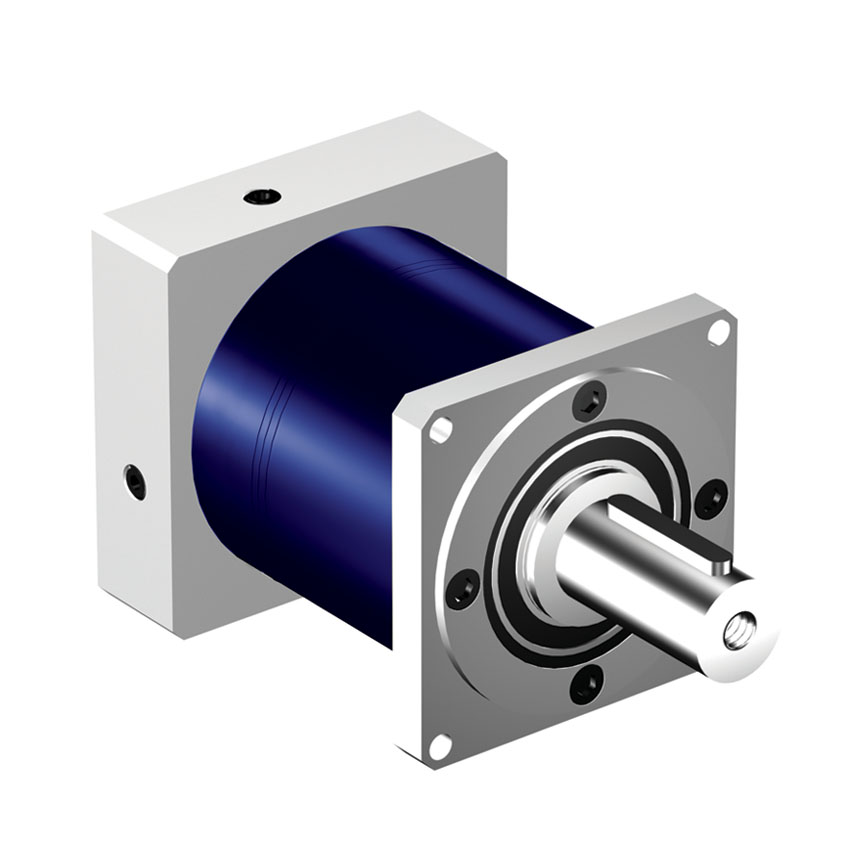



 扫一扫添加微信
扫一扫添加微信